

Welcome to the benchtop trebuchet home page!
The trebuchet has quickly become a favorite project for physics and engineering teachers seeking to provide students with a simple – but spectacular – hands-on design project. The trebuchet itself is a simple device, easy (and forgiving) to build, and entirely powered by gravity. The major parts of the traditional trebuchet are shown schematically in the figure above. The projectile is held in a sling suspended from the hook on one side of the trebuchet arm. The counterweight is hung on the other (usually shorter) side of the arm. The arm rotates on a pivot which is rigidly mounted onto the base.
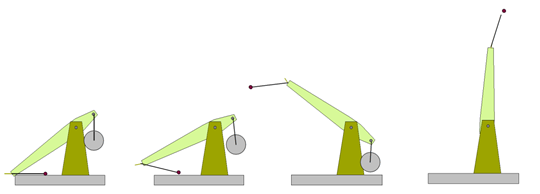
To launch the projectile, the counterweight is raised until the hook rests on the ground and then released. As the counterweight falls, the arm rotates (clockwise, in the diagram above) and the sling whips around until the projectile is released. The angle of the hook is critical here – the projectile is released when the sling and hook are aligned. The series of 'cartoons' above illustrates the sequence.
These pages provide simulations of a variety of different trebuchet types. Some of the trebuchets are very simple, containing only an arm, counterweight and projectile. Others are more involved, with slings, counterweight hangers and moving carts. The most complex simulations are for the 'floating arm' trebuchet, which has become an instant classic among mechanical engineering students.
Each of the simulations allows you to vary the important parameters of the trebuchet: arm lengths, projectile and counterweight masses, etc. The trebuchet system is complicated enough that finding the 'optimal' parameters is quite challenging (and interesting). I suggest trying out the simple trebuchet simulations first, before moving on to the floating arm simulations. It's very easy to choose a bad set of parameters that cause the trebuchet to fire backwards or straight into the ground!
Please note that these are simulations and not simply animations. The equations of Lagrange were used to model the systems, along with the Lagrangian approach to constraint handling. The interested reader can consult the paper provided on the Literature page for more information.
